Antes do aparecimento dos robôs, tudo parecia indicar que somente as grandes séries poderiam ser objeto de uma fabricação automatizada.
As tecnologias clássicas tinham permitido, na década de 50, avanços importantes nos processos contínuos (cimento, vidro, etc) e na década de 60, massificação de artigos de grande consumo (automóveis, eletrodomésticos, etc); mas até bem avançado na década de 70 não foi possível introduzir um novo conceito nas cadeias de fabricação: a flexibilidade.
O desenvolvimento impetuoso da informática permitiu que um dispositivo eletrônico governasse os equipamentos mecânicos adequados e que, em função de diversos programas, aquele dispositivo executasse sucessivamente diferentes trabalhos.
Os robôs
As máquinas de controle numérico, de elevado custo e desempenho limitado, tiveram grande aceitação para fabricações muito concretas.
A sequência de fabricação estabeleceu-se previamente através de um suporte adequado (fita de papel perfurada, colocação de determinadas chapas num tabuleiro, fita magnética, etc).
Uma vez fixado o programa, a máquina o repetia até que fosse substituído.
Essas máquinas programavam as funções de usinagem (tipo de ferramenta, velocidade do avanço, longitude do avanço, etc), mas geralmente não possuíam manipuladores das peças.
Passou-se ainda algum tempo antes do aparecimento dos manipuladores mecânicos ou robôs programáveis.
Entramos então numa nova era da sociedade industrial.
Nesse contexto não serão considerados os robôs móveis nem aqueles aplicados na medicina, más somente os de uso industrial ou robôs industriais.
Com a finalidade de esclarecer conceitos, é necessário esclarecer que os robôs móveis são aqueles que, até certo ponto, imitam um ser humano ou um veículo e têm capacidade para deslocar-se com certa autonomia; no campo da medicina constituem próteses que suprem determinadas funções do corpo humano.
Os robôs industriais são elementos auxiliares da fabricação cuja missão básica é a manipulação de peças.
No Japão, consideram-se robôs todos os artifícios mecânicos colaboradores dos processos de produção, que possuem algum grau de liberdade.
No mundo ocidental, a definição é muito mais restrita, pois exige que as diferentes operações sejam realizadas sem outro recurso que não seja a programação informática.
Observe-se que a definição japonesa considera robôs todas as máquinas automáticas com algum grau de liberdade, ao passo que a definição ocidental exige uma unidade central eletrônica programável.
Esta disparidade com frequência induz a erro, já que a comparação de estatísticas entre o Japão e o Ocidente não é possível nesse campo.
A definição de robô adotada pela publicação Robótica Industrial é “aquela máquina independente de manipulação, concebida para uso industrial, suscetível de efetuar operações diferentes mediante uma programação e capaz de movimentar-se simultaneamente com um mínimo de três graus de liberdade”.
Conhece-se geralmente como graus de liberdade o conjunto de movimentos básicos executáveis por um sistema mecânico.
O tipo de robô mais adequado para a solução de funções complexas nas cadeias produção é constituído pelo chamado robô de aprendizagem, capaz de repetir quantas vezes se desejar um conjunto de movimentos que a hábil mão de um operador humano mostrou em determinado momento.
São de grande utilidade, por exemplo, no processo de pintura de peças complexas.
Outros robôs obedecem unicamente a funções numéricas e condicionam seu trabalho à sequência e às grandezas numéricas ordenadas.
O chamado robô inteligente é o mais sofisticado, já que em função de determinadas características de seu ambiente é capaz de atuar num ou noutro sentido.
Certamente, todas as ações alternativas devem ter sido programadas previamente, como em qualquer dispositivo informatizado.
Uma visão genérica dos robôs costuma considerar neles três partes fundamentais:
- O elemento posicionador, responsável por situar o extremo do robô num certo espaço desejado (com três graus de liberdade).
- A mão com os dois ou três graus de liberdade, que se move independentemente do elemento posicionador.
- A ferramenta preensora, capaz de apanhar e manipular peças.
Quanto aos sistemas de acionamento, os robôs podem mover-se de forma:
- Pneumática, hoje quase em desuso.
- Hidráulica, para trabalhos que exigem grande potência.
- Elétrica, majoritária para potências médias e baixas.
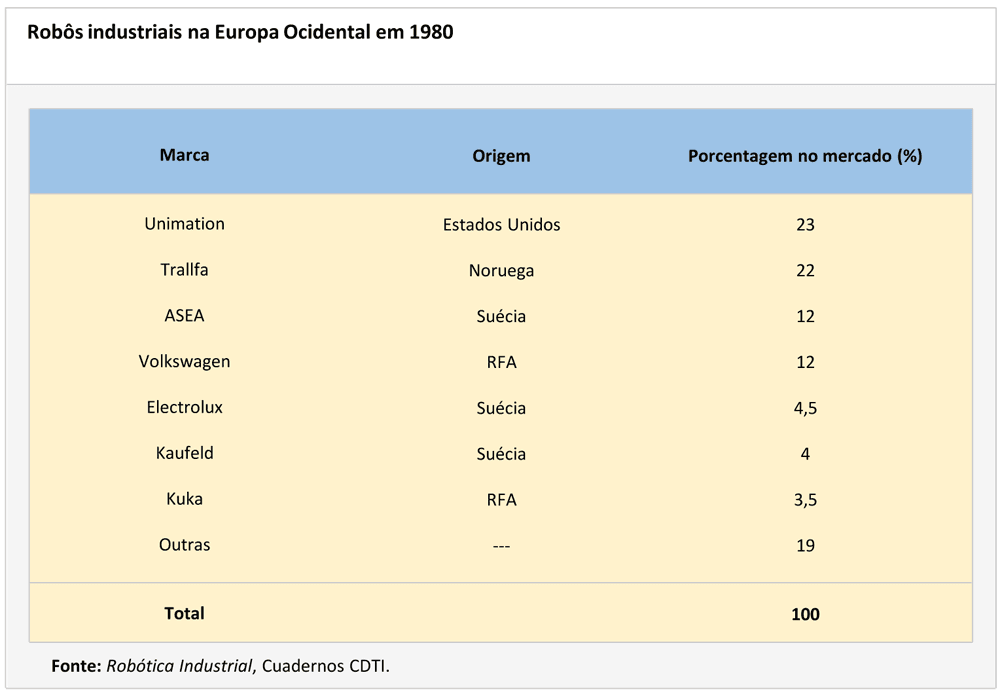
É curioso observar os avanços conseguidos pelos países nórdicos neste campo.
O quadro “Robôs industriais na Europa Ocidental” apresenta a porcentagem do mercado ocupada pelas diversas marcas produtoras de robôs, naquela parte do mundo.
Leia mais em:
- Entenda as novas tecnologias nos escritórios
- Entenda as novas tecnologias na sociedade
- Entenda as novas tecnologias: as chaves da mudança
- Entenda a nova informática
- Como entender o impacto das novas tecnologias
- Entenda as novas tecnologias nos escritórios técnicos
Fonte: Victor Obach – Doutor Engenheiro Industrial. Foi chefe de informática do Grupo Piher. Antigo Presidente da Convenção Informática Latina.
![]()


